Projet ICN4 2016/2017
Sommaire |
Participants
- Noé CHACHIGNOT
- Lilian MARSAL
Cahier des charges
Le cahier des charges est assez conséquent :
- monter le chassis du robot ;
- créer un "bouclier" pour Arduino comprenant le contrôleur de moteurs et le sonar ultrasons et des connecteurs pour servo-moteurs ;
- concevoir la pince à base de servo-moteurs ;
- interfacer l'Arduino et la Raspberry Pi configurée en mode point d'accès WiFi ;
- Réaliser l'interface Web de contrôle du robot.
Réalisations
Châssis du robot

Nous avons monté un châssis pour un "véhicule" capable de se déplacer avec des moto-réducteurs et une roue folle. Nous avons aussi commencé à nous approprier l'environnement de développement de l'Arduino.
Nous avons aussi soudé les fils sur les moteurs.
La photo montre le châssis du robot en cours de montage et un des servo-moteurs qui permettra de réaliser la pince.
Bouclier de contrôle
Nous avons appris à nous servir du logiciel Fritzing pour modéliser le montage entre l'Arduino et le contrôleur de moteur. Nous avons ensuite réalisé le montage avec une plaque d'essai. Nous avons écrit un programme pour faire avancer le robot, il marche mais une seule roue fonctionne. Nous avons vérifié le montage pour nous apercevoir qu'un fil état défectueux. Le robot avance maintenant avec ses deux roues.


Nous avons ensuite "routé" le circuit imprimé : c'est à dire qu'il faut placer les composants sur la plaque puis tracer les pistes entre les composants sans qu'elles se touchent.
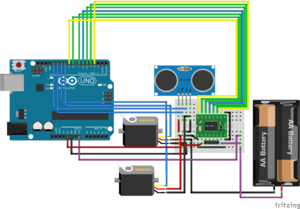
Plaque d'essai
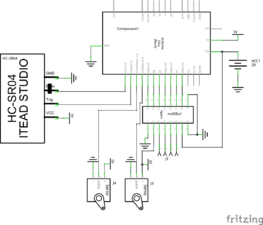
Schématique
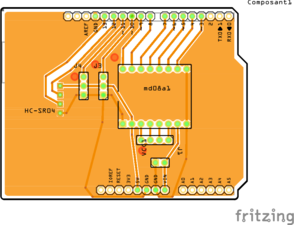
Circuit électronique



Le circuit imprimé a été gravé lors de notre visite à Polytech'Lille.

Nous avons ensuite fait les soudures nécessaires, et nous avons ainsi pu raccorder le bouclier à la carte Arduino, nomme le montre la photo ci-dessous.

Et nous avons pu coder la carte afin de faire un premier essai. Ce dernier s'est avéré être un succès !
Après cela nous avons commencé par programmer la Raspberry pi grâce au tutoriel disponible sur ce même site. En suivant chaque étape nous avons réussi à la transformer en point d'accès WIFI afin de pouvoir s'y connecter depuis un téléphone. Nous avons aussi créer une page Web. Nous avons dû lié cette page Web à un serveur qui pouvait faire une liaison série avec la carte arduino. Nous avons fini par y parvenir nous avons désormais la possibilité de contrôler le robot vais un site Internet accessible depuis un téléphone connecté à la Raspberry pi.
A réaliser
- tester le bouclier de contrôle du robot pour la gestion des moteurs ;
- tester le bouclier pour la mesure des obstacles frontaux ;
- tester le bouclier pour le contrôle des servo-moteurs ;
- concevoir un système de pince pour ramasser des petits objets ;
- configurer la Raspberry PI pour la transformer en point d'accès WiFi ;
- connecter la Raspberry PI et l'Arduino par liaison série ;
- concevoir un site Web pour afficher l'image de la caméra de la Raspberry ;
- améliorer le site Web pour contrôler les moteurs du robot et les servo-moteurs de la pince.