Projet ICN2 2016/2017
Participants
- Nassim BOUDANES
Cahier des charges

Pour réaliser ce robot filoguidé les composants suivants vont être utilisés :
- un chassis avec moteurs et chenilles ;
- deux joysticks miniatures pour la commande ;
- un contrôleur de moteurs ;
- un détecteur ultra-son ;
- un Arduino nano pour gérer le tout.
Réalisations

Dans les premières séances complétement monté est utilisé pour comprendre la programmation de ce type de robot.
Il a été décidé de construire un circuit imprimé pour la manette, le circuit comprend deux joysticks et une prise RJ12 femelle. Le câble entre la manette et le robot sera constitué d'un câble à 6 conducteurs avec deux prises RJ12 mâles à chaque bout. Le logiciel Fritzing est utilisé pour concevoir le circuit imprimé. Le fichier de ce circuit est disponible Fichier:Manette.fzz.
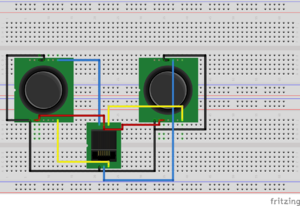
Plaque d'essai
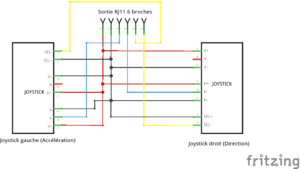
Schématique
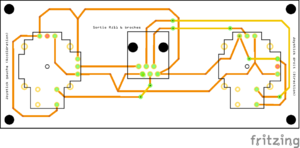
Circuit électronique




Pour que la manette soit plus simple d'utilisation, une forme a été créée avec inkscape pour obtenir une plaque de plexiglass adaptée.
Finalisation du circuit de la manette sur Fritzing (création de la platine d'essai et du circuit imprimé en respectant les non-croisements des câbles).