Projet ICN robot sonore A.T.A 2017/2018
Bien le bonjour mesdames et monsieur et bienvenue sur cette magnifique, MAGNIFIQUE page sur un robot totalement incroyable et innovant !!!
Bienvenue sur la page Modification de Projet ICN robot sonore A.T.A 2017/2018 dit robot calmant !!!
Sommaire |
Participants
- Antoine BUGNER
- Alexandre DELAHAYE
- Tinaël DELZENNE-ZAMPARUTTI
Circuit imprimé
Voici le circuit imprimé utilisé pour le robot sonore. Après des interminables heures de travail et de pause café, nous avons enfin réussi !!!!
Attention, ce fichier est soumis droit d'auteur donc aucune copie ne sera toléré

Voici le fichier .fzz pour ceux qui voudrait voir comment nous avons procéder.
Les composants du robot :
Le micro
Fichier:IMG 20171122 113033.jpg|200px|thumb|right|Voici le micro utilisé

Voici le micro utilisé

autre vue.


Plaquette et plaquette verte pololu md08 avec des fils
Plaquette avec pololu md08 et donc plusieurs fils qui permettent le bon fonctionnement de l'appareil.
200px|thumb|left|carte Arduino vierge
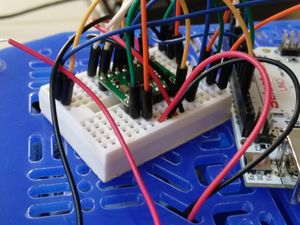
200px|thumb|left|Voici la plaquette avec la pololu md08 et plusieurs fils qui y sont renseigné dans le fichier suivant :Media:Projet ICN A.T.A.fzz


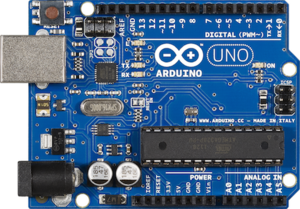
Carte Arduino Uno
Voici la carte principale donc l'Arduino Uno qui est donc la base de la commande du robot.

Les étapes du montage du robot
Première étape : 1.
Montage du robot, manque de matériel, nous n'avons pas pus prendre de photos de la construction. Mais après des heures de travailles acharnées, nous avons terminer le montage du robot mais sans la carte arduino et la plaquette avec la pololu md08
Première étape : 2.
Position des fils sur le logiciel fritzing, puis créations de la carte via informatique : Après des heures de positionnements des fils pour les rendre parallèle, la couleur et rendre quand meme le rendu un minimum "beau", nous avons réussis. voici le fichier : Media:Projet ICN A.T.A.fzz
Les programmes
Voici le programme arduino qui permet de faire marcher les moteurs du robot et donc pouvoir le contrôler et faire bouger ce robot
int pwmB = 11; int bin2 = 13; int bin1 = 12; int stby = 8; int ain1 = 7; int ain2 = 4; int pwmA = 3;
void setup()
{
Serial.begin(9600);
pinMode(pwmB, OUTPUT);
pinMode(bin2, OUTPUT);
pinMode(bin1, OUTPUT);
pinMode(stby, OUTPUT);
pinMode(ain1, OUTPUT);
pinMode(ain2, OUTPUT);
pinMode(pwmA, OUTPUT);
Serial.println("Avant");
digitalWrite(ain1, HIGH);
digitalWrite(ain2, LOW);
digitalWrite(stby, LOW);
digitalWrite(bin1, HIGH);
digitalWrite(bin2, LOW);
analogWrite(pwmA, 131.5);
analogWrite(pwmB, 125);
}
void loop()
{
}