Projet ICN2 2016/2017
Rex (discuter | contributions) (→Contrôle du chassis) |
Rex (discuter | contributions) (→Contrôle du chassis) |
Version du 7 juin 2017 à 09:43
Sommaire |
Participants
- Nassim BOUDANES
Cahier des charges

Pour réaliser ce robot filoguidé les composants suivants vont être utilisés :
- un chassis avec moteurs et chenilles ;
- deux joysticks miniatures pour la commande ;
- un contrôleur de moteurs ;
- un détecteur ultra-son ;
- un Arduino nano pour gérer le tout.
Réalisations
Prise en main

Dans les premières séances un chassis complétement monté est utilisé pour comprendre la programmation de ce type de robot.
La manette
Il a été décidé de construire un circuit imprimé pour la manette, le circuit comprend deux joysticks et une prise RJ12 femelle. Le câble entre la manette et le robot sera constitué d'un câble à 6 conducteurs avec deux prises RJ12 mâles à chaque bout. Le logiciel Fritzing est utilisé pour concevoir le circuit imprimé. Le fichier de ce circuit est disponible Fichier:Manette.fzz.
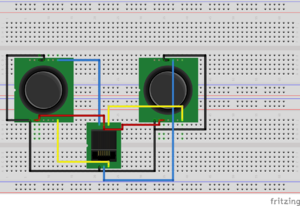
Plaque d'essai
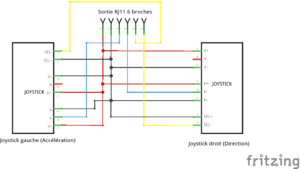
Schématique
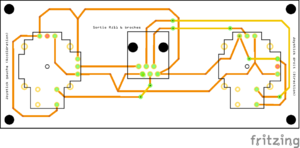
Circuit électronique



Le circuit de la manette a été produit par la société Fritzing, les deux exemplaires sont visibles sur la photo.



Pour que la manette soit plus simple d'utilisation, une forme a été créée avec inkscape pour obtenir une plaque de plexiglass adaptée.
La plaque a été découpée à Polytech'Lille mais avec des réglages mal adaptés, d'où les traces de brulé.
Contrôle du chassis
Un contrôleur de moteurs pololu à base de circuit TB6612FNG a ensuite été testé pour faire tourner les moteurs du chassis de test.


À terme ce montage doit être utilisé pour le chassis acheté par l'élève.


Comme il n'est pas pratique de fixer la plaque d'essai au chassis, un second circuit imprimé Media:Robot chenille.fzz a été conçu, le circuit comporte :
- une prise RJ12 femelle pour connecter le câble en provenance de la manette ;
- un emplacement pour l'Arduino nano ;
- un emplacement pour le contrôleur de moteurs pololu ;
- un emplacement pour le détecteur ultrasons.
Plaque d'essai
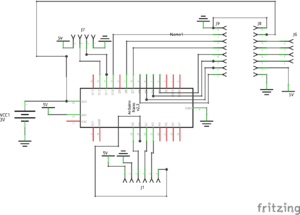
Schématique
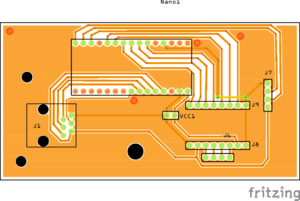
Circuit électronique



Le circuit imprimé a été gravé lors de la visite à Polytech'Lille.

Voici une image du rendu actuel de la manette :

Rendu actuel de la manette

Vue globale de la manette

Vue d'ensemble



Le circuit principal a été fixé sur le chassis, et le programme de fonctionnement a été écrit et est fonctionnel.

Robot de face gauche
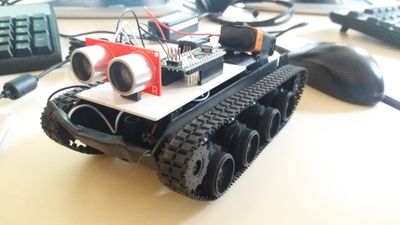
Robot de profil

Robot de face droite



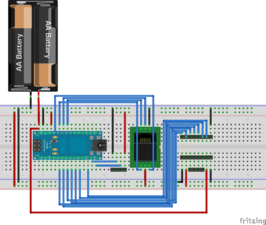
Le problème ensuite rencontré est le suivant : l'alimentation.
En effet, le chassis ne possède que 4 emplacement de piles AA, pour un total de 6V, alors que le voltage nécessaire est de 9V, il manque donc 2 piles.
Il fallut alors créer une plaque contenant un emplacement pour 2 piles, et cette plaque permettra de gérer l'ensemble de l'alimentation du robot.
Le fichier Fritzing est téléchargeable ici : Media:Plaque Alimentation Robot.fzz.

Une fois la plaque installé, le robot est bien alimenté et fonctionne parfaitement.
À réaliser
Améliorer le programme et surtout la sensibilité des joysticks pour permettre une meilleure précision.