Projet ICN3 2016/2017
Rex (discuter | contributions) (→Equipement de la maison) |
Rex (discuter | contributions) |
Version du 17 septembre 2017 à 20:33
Sommaire |
Participants
- Paul LAMANDE
- Grégoire FLEURY
- Baptiste SENECLAUZE
Cahier des charges

La maquette de maison doit comporter les dispositifs suivants.
- volets asservis par des servo-moteurs ;
- détection de la lumière ambiante pour l'ouverture ou la fermeture des volets et pour allumer ou éteindre les lumières ;
La maquette de la maison est conçue en 3D puis réalisée à l'ancienne à partir de contre-plaqué.
Les élements sont commandé par un Arduino lui-même relié à une Raspberry Pi pour la gestion par smartphone.
Réalisations
Montages électroniques
Différents montages ont été testés :
- Montage pour le sonar ultrason : le montage permet d'allumer une LED sur détection de mouvement. Le montage a été réalisé sur une plaque d'essai puis un programme a été écrit pour ce montage.
- Montage pour le servo-moteur : le montage permet de faire bouger le servo-moteur. Là aussi montage sur plaque d'essai et programme de test.
- Montage pour la photo-résistance ; le montage permet d'allumer une LED en cas d'intensité lumineuse faible. Le test a été réalisé avec des luminosités différentes.
- plutôt qu'une LED nous avons décidé d'utiliser une ampoule 100mA
Maquette de la maison
La maquette de la maison a d'abord été représentée sur Google Sketchup (ajouter le dessin).
Nous avons, pendant les vacances, réalisé la maison en contreplaqué, peinte et volet équipés de charnières.

Vue de l'extérieur de la maison (volets motorisés) encore absence de capteurs et de LED

Ici une autre vue, de l'intérieur cette fois. La maison est en coupe pour observer les systèmes.
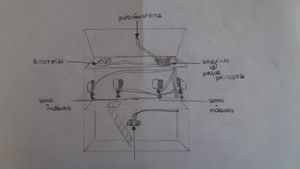
Schéma d'ensemble de la maison



Bouclier de commande
Nous avons réalisé un montage complet avec des servo-moteurs, une photo-résistance et un sonar ultrason. Nous écrivons aussi le programme faire fonctionner ce montage.

Nous modélisons le circuit imprimé grâce au logiciel de création de circuit imprimés Fritzing. Le fichier de la carte est disponible : Media:emaison.fzz.
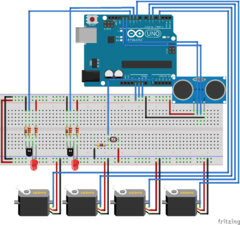
Plaque d'essai
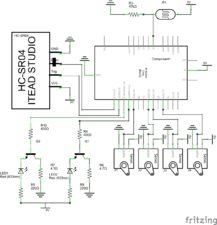
Schématique
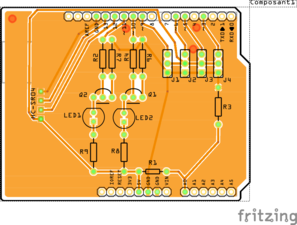
Circuit électronique



Le circuit imprimé a été gravé lors de notre visite à Polytech'Lille.

Equipement de la maison
Le circuit imprimé a été soudé et inséré au dessus de l'arduino comme la photo ci-dessous le montre.

La maquette de la maison a été équipée de différents capteurs et actionneurs comme cela se voit sur les photos ci-après.

Vue sur les servo-moteurs et sur la lampe
Cherchez la photo-résistance et le sonar ultrason

Programme
Le programme de commande des servo-moteurs des volets en fonction de la lumière est le suivant :
#include <Servo.h>
int photocellPin = A0;
int photocellReading;
Servo monServo;
Servo tonServo;
Servo sonServo;
Servo leurServo;
void setup(){
monServo.attach(9, 1000, 2000);
tonServo.attach(3, 1000, 2000);
sonServo.attach(5, 1000, 2000);
leurServo.attach(6, 1000, 2000);
Serial.begin(9600);
}
void loop(){
photocellReading = analogRead(photocellPin);
Serial.println(photocellReading);
if (photocellReading < 500) {
monServo.write(0);
tonServo.write(0);
sonServo.write(0);
leurServo.write(0);
}
else if (photocellReading > 500) {
monServo.write(180);
tonServo.write(180);
sonServo.write(180);
leurServo.write(180);
}
delay(5000);
}
Un autre programme allume une lumière sur détection d'un mouvement en face de la maison :
int duration;
int distance;
int sensorpin = 12;
int pinRelais = 13;
void setup()
{
Serial.begin(9600);
pinMode(pinRelais, OUTPUT);
}
void loop()
{
pinMode(sensorpin, OUTPUT);
digitalWrite(sensorpin, LOW);
delayMicroseconds(2);
digitalWrite(sensorpin, HIGH);
delayMicroseconds(10);
digitalWrite(sensorpin, LOW);
pinMode(sensorpin, INPUT);
duration =pulseIn(sensorpin, HIGH);
distance = duration/58;
Serial.println(distance);
delay(100);
if (distance < 20){
digitalWrite(pinRelais, HIGH);
}
if (distance > 20){
digitalWrite(pinRelais, LOW);
}
}