Projet ICN robot sonore A.T.A 2017/2018
(→Support micro) |
(→2. Montage du micro) |
| (11 révisions intermédiaires par 3 utilisateurs sont masquées) | |
Version actuelle en date du 6 juin 2018 à 13:42
Bienvenue sur la page de Projet ICN robot sonore A.T.A 2017/2018 robot calmant !!!
Sommaire |
[modifier] Participants
- Antoine BUGNER
- Alexandre DELAHAYE
- Tinaël DELZENNE-ZAMPARUTTI
[modifier] Le robot
Donc le but de ce robot est simple : juste détecter les zones où il y a du bruits, et enclencher une enceinte disant à la personne ou à la zone du bruit quelque chose... C'est un robot unique au monde et donc nous sommes heureux de vous le présenter.

Le robot avec les fils.

Sans fils

Du dessous



[modifier] Circuit imprimé
Voici le circuit imprimé utilisé pour le robot sonore, ou calmant

Voici le fichier .fzz pour ceux qui voudrait voir comment nous avons procéder.
Media:Projet ICN A.T.A.fzz
[modifier] Les composants du robot :
[modifier] Le micro

Voici le micro utilisé

autre vue.


[modifier] Plaquette d'essais et plaquette pololu md08
Plaquette avec pololu md08 et donc plusieurs fils qui permettent le bon fonctionnement de l'appareil.
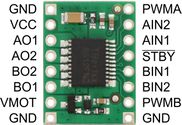
POLOLU Md08

Pololu Md08

plaquette essais vierge

Voici la plaquette avec la pololu md08 et plusieurs fils qui y sont renseigné dans le fichier suivant :Media:Projet ICN A.T.A.fzz




Bien sur, étant donner que c'est quand même beaucoup plus simple d'enlever les fils, nous avons remplacer tous ça avec une carte arduino ou tous les fils sont remplacés par des circuits gravé sur une plaque de cuivre. On appelle ça "bouclier".
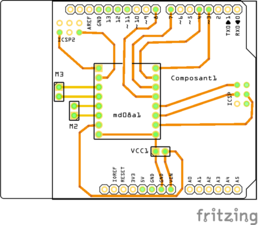
donc voici la version numérique :

et voici le final :
[modifier] Carte Arduino Uno
Voici la carte principale donc l'Arduino Uno qui est donc la base de la commande du robot.

[modifier] Les étapes du montage du robot
[modifier] Première étape : Faire que le robot puisse rouler. 1.
Montage du robot, manque de matériel, nous n'avons pas pus prendre de photos de la construction. Mais après cela, nous avons terminé le montage du robot mais sans la carte arduino et la plaquette avec la pololu md08
[modifier] 1e. 2.
Position des fils sur le logiciel fritzing, puis créations de la carte via informatique : Voici le fichier : Media:Projet ICN A.T.A.fzz
[modifier] 1e. 3.
Création du "bouclier" donc de la plaque de cuivre avec tous les systèmes.

[modifier] 1e. 4. La soudure !

Le fer à souder


Et donc en plus précis...

Soudure finie




[modifier] 1e. 5. Etape terminée !!!
C'est bon, la carte est terminé, il faut plus que nous la relions sur la base arduino et le moteur pourra être en état fonctionnel.

[modifier] 2. Montage du micro
[modifier] Test du micro
Nous devons mettre le micro sur la plaque d'essai pour le tester.
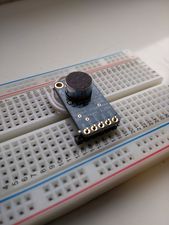
Micro sur plaque d'essai.
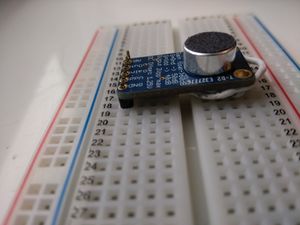
Autre vue


[modifier] Support micro
Voici les differentes versions de support:
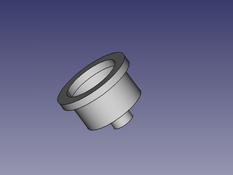
étape 1
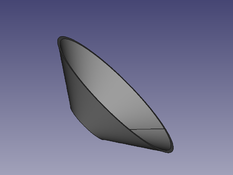
étape 2
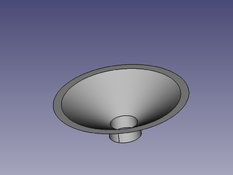
étape 3
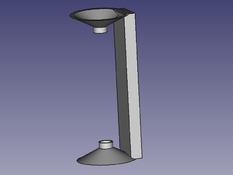
étape finale




[modifier] 2. fonctionnement du micro
[modifier] Les programmes
Voici le programme arduino qui permet de faire marcher les moteurs du robot et donc pouvoir le contrôler et faire bouger ce robot
int pwmB = 11;
int bin2 = 13;
int bin1 = 12;
int stby = 8;
int ain1 = 7;
int ain2 = 4;
int pwmA = 3;
void avancer(void)//Déclare la fonction qui fait avancer le robot
{
Serial.println("Avant");
digitalWrite(ain1, HIGH);//Lance le courant
digitalWrite(ain2, LOW);
digitalWrite(stby, HIGH);
digitalWrite(bin1, HIGH);
digitalWrite(bin2, LOW);
analogWrite(pwmA, 131.125);//Donne la puissance du moteur 1
analogWrite(pwmB, 125);//Donne la puissance du moteur 2 (pour qu'il aille droit)
}
void tour(void) //Déclare la fonction qui fait effectuer un tour au robot
{
Serial.println("Tour");
digitalWrite(ain1, LOW);//Lance le courant...
digitalWrite(ain2, HIGH);//et fait en sorte qu'un des moteurs tourne a l'envers pour que le robot tourne sur lui-même
digitalWrite(stby, HIGH);
digitalWrite(bin1, HIGH);
digitalWrite(bin2, LOW);
analogWrite(pwmA, 131.125);//Donne la puissance du moteur 1
analogWrite(pwmB, 125);//Donne la puissance du moteur 2
delay(3750);//Donne le temps durant lequel le robot va tourner sur lui-même
digitalWrite(stby, LOW);//arrête les moteurs
}
void demitour(void)
{
Serial.println("Tour");
digitalWrite(ain1, LOW);
digitalWrite(ain2, HIGH);
digitalWrite(stby, HIGH);
digitalWrite(bin1, HIGH);
digitalWrite(bin2, LOW);
analogWrite(pwmA, 131.125);
analogWrite(pwmB, 125);
delay(890);
digitalWrite(stby, LOW);
}
void quarttour(void)
{
Serial.println("Tour");
digitalWrite(ain1, LOW);
digitalWrite(ain2, HIGH);
digitalWrite(stby, HIGH);
digitalWrite(bin1, HIGH);
digitalWrite(bin2, LOW);
analogWrite(pwmA, 131.125);
analogWrite(pwmB, 125);
delay(450);
digitalWrite(stby, LOW);
}
void setup()
{
Serial.begin(9600);
pinMode(pwmB, OUTPUT);
pinMode(bin2, OUTPUT);
pinMode(bin1, OUTPUT);
pinMode(stby, OUTPUT);
pinMode(ain1, OUTPUT);
pinMode(ain2, OUTPUT);
pinMode(pwmA, OUTPUT);
tour(); // Exécute la fonction du tour
avancer();
demitour();
avancer();
tour();
}
void loop()
{
}
Voici le programme arduino qui permet de faire marcher les moteurs du robot et donc pouvoir le contrôler et faire bouger ce robot
const int capteur1 =A0;// pin connecté à la sortie digital du micro L
const int capteur2 =A1;// pin connecté à la sortie digital du micro R
const int LED1 =12;// pin connecté à la LED RED + resistance
const int LED2 =13;// pin connecté à la LED GREEN + resistance
void setup()
{
pinMode(capteur1, INPUT);//Déclare le micro 1
pinMode(capteur2, INPUT);//Déclare le micro 2
pinMode(LED1, OUTPUT);//Déclare la led 1
pinMode(LED2, OUTPUT);//Déclare la led 2
Serial.begin (9600);
}
void loop()
int v1 = analogRead(capteur1);//Déclare la variable du volume capté et met cette variable au niveau du volume capté par le micro 1
int v2 = analogRead(capteur2);//Déclare la variable du volume capté et met cette variable au niveau du volume capté par le micro 2
if (v1>8)//si le volume est superieur a 8, la led s'allume
{
Serial.println(v1);
digitalWrite(LED1, HIGH);// Eteindre la LED
delay(100);// Temps de traitement
digitalWrite(LED1, LOW);
delay(100);
}
if (v2>10)
{
Serial.println(v2);
digitalWrite(LED2, HIGH);// Eteindre la LED
delay(100);// Temps de traitement
digitalWrite(LED2, LOW);
delay(100);
}
}